I build robots that learn to touch the world.
Computer Science researcher and practitioner, trying to close the gap between robotics theory and what actually works in the industry. My focus is reinforcement learning and control systems.
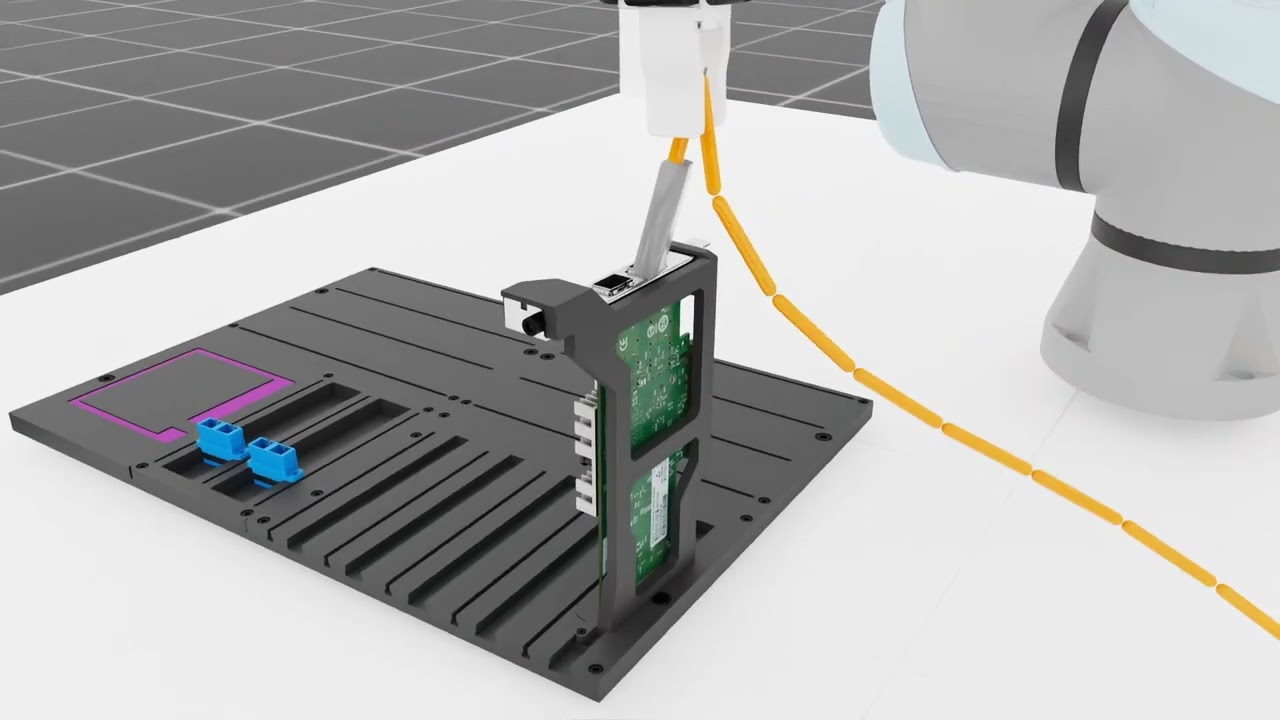
I have a long track of open-source contributions and production level robotics software at Franka Robotics, from sim-to-real reinforcement learning up to the control frameworks that ship inside the real machines.
Open-source robotics, reinforcement learning and the systems that connect simulation to real hardware.

Some notes on reinforcement learning, sim-to-real and the not so glamorous software that makes robots actually work. All of it lives on Medium.
What I get up to when I am away from the keyboard.
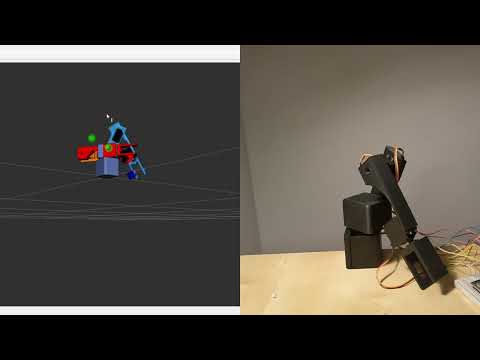
Building production robotics software at Franka Robotics, and spending my nights on contact-rich manipulation with reinforcement learning. More and more I am convinced the real bottleneck in robotics is good software, not only bigger models, so I try to write about it more.
A small mobile robot running on hoverboard wheels, where i drive the two motors with an ODrive controller. Right now i am getting the low level wheel control solid first, before putting any autonomy on top.
Let's build something that moves.